









IMU3-2A Inertial Measurement Unit
IMU3-2A Inertial Measurement Unit
This instruction manual is the main reference document for the use and operation of IMU3-2A micro gyroscope combination.The micro-gyroscope assembly can be configured into biaxial or triaxial according to the customer‘s requirements. This manual describes the three-axis gyroscope assembly, and the biaxial product also meets the requirements of this manual.This instruction manual is mainly prepared in accordance with the Technical Agreement of IMU3-2A Micro Gyroscope Assembly and the Technical Conditions of IMU3 Inertial Measurement Unit and Triaxial Gyroscope Assembly.
Measuring range::± 400 °/s
bias stability (@ Allan variance):≤ 1 °/H
Random walk:≤ 0.2 °/√ H
bias repeatability:≤10°/h
……



DESCRIPTION
-------------------------------------------------------------------------------------------------------------------------
This instruction manual is the main reference document for the use and operation of IMU3-2A micro gyroscope
combination.The micro-gyroscope assembly can be configured into biaxial or triaxial according to the customer's
requirements. This manual describes the three-axis gyroscope assembly, and the biaxial product also meets the
requirements of this manual.
This instruction manual is mainly prepared in accordance with the Technical Agreement of IMU3-2A Micro
Gyroscope Assembly and the Technical Conditions of IMU3 Inertial Measurement Unit and Triaxial
Gyroscope Assembly.The micro gyroscope assembly is composed of a three-axis gyroscope, a temperature
sensor, a signal processing board, a structure and necessary software, and is used for measuring the
three-axis/two-axis angular rate of a carrier, and outputting three angular rate data subjected to error
compensation (including temperature compensation, installation misalignment angle compensation,
nonlinear compensation and the like) through an RS-422 serial port according to an agreed
communication protocol.
FEATURES
----------------------------------------------------------------------------------------------------------------------------
a)Measuring range: ± 400 °/s
b)Zero-bias stability (@ Allan variance): ≤ 1 °/H
c)Zero-bias stability (1s smooth, 1σ, room temperature): ≤ 10 °/H
d)Zero bias error within full temperature range: ≤ 20 °/H
e)Random walk: ≤ 0.2 °/√ H
APPLICATION
----------------------------------------------------------------------------------------------------------------------------
●UAV/AUV/Helicopter ●Tactical nuclear weapons ●Aeronautics and astronautics
●Integrated navigation system ●inertial platform stabilizing ●Vehicle navigation

Technical Parameter
IMU3-2A Inertial Measurement Unit
PARAMETER
a)Measuring range: ± 400 °/s
b)Zero-bias stability (@ Allan variance): ≤ 1 °/H
c)Zero-bias stability (1s smooth, 1σ, room temperature): ≤ 10 °/H
d)Zero bias error within full temperature range: ≤ 20 °/H
e)Random walk: ≤ 0.2 °/√ H
f)Zero-bias repeatability:≤10°/h
g)Zero bias acceleration sensitivity: ≤ 1 °/H/G
h)Resolution: ≤ 0.001 °/s
i)Scale factor nonlinearity: ≤ 100ppm
j)Repeatability of scale factor: ≤ 100ppm
k)Cross coupling: ≤ 0.1%
l)Bandwidth: ≤250Hz
m)Weight: (52 ± 5) G
1.2.2Power supply requirements
a)Supply voltage: (+ 5 ± 0.5) V (DC);
b)Power supply current: working current < 0.3A;
1.2.3Environmental adaptability
a)Working temperature: (-45 ~ 85) ℃
b)Storage temperature: (-55 ~ 105) ℃
c)Vibration: 10 ~ 2000Hz, 6.06g
d)Impact: 5000 G, 0.1ms
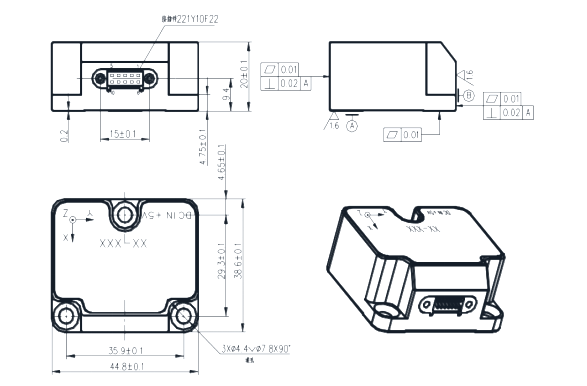
DIMENSION

Product Consultation
Product Consultation Form
Contact Us